PRIMU: Uncertainty Estimation for Novel Views in Gaussian Splatting from Primitive-Based Representations of Error and Coverage
Thomas Gottwald1 • Edgar Heinert2 • Peter Stehr1 • Chamuditha Jayanga Galappaththige3 • Matthias Rottmann2
1 Department of Mathematics, University of Wuppertal, Wuppertal, Germany
2 Institute of Computer Science, University of Osnabrück, Osnabrück, Germany
3 Centre for Robotics, Queensland University of Technology, Brisbane, Australia


Abstract
We introduce PRIMU (Primitive-based Representations of Uncertainty), a post-hoc uncertainty estimation framework for Gaussian Splatting.
PRIMU constructs primitive-level representations of training-view coverage, training error and field-of-view occurrences.
Based on these representations, we render uncertainty feature maps, on which a pixel-wise regression is performed to obtain final, pixel-level uncertainty estimates.
• We demonstrate the effectiveness of our approach for estimating uncertainty in rendering and depth error.
• Additionally, we study uncertainty estimation on foreground objects and backgrounds, as well as the use of different feature map combinations and the generalization capabilities of the regression models to unseen scenes.
• We use the proposed uncertainty feature maps to directly guide active view selection, prioritizing viewpoints with high uncertainty indicators.
Method Overview
Step 1: Construct the Gaussian primitive representations by projecting information relevant for uncertainty estimation (training error, training-view coverage, field-of-view occurrences) onto them. The projection for training error and training-view coverage can be direction-dependent.
Step 2: Render uncertainty feature maps based on the Gaussian primitive representations.
Step 3: Perform pixel-wise regression on the uncertainty feature maps to obtain pixel-level uncertainty predictions. The regression model is trained on one or few holdout views to predict the true rendering/depth error.
Method Figure

Numerical Results
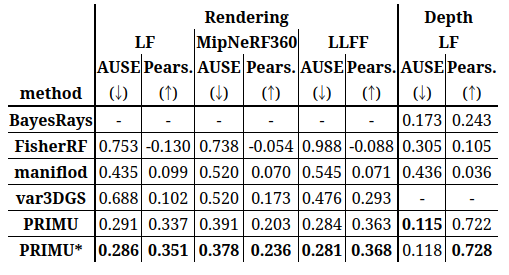
Uncertainty Estimation
AUSE and Pearson correlation between uncertainty map and rendering/depth error on LF, MipNeRF360 and LLFF datasets. PRIMU used direction-dependent uncertainty feature maps.
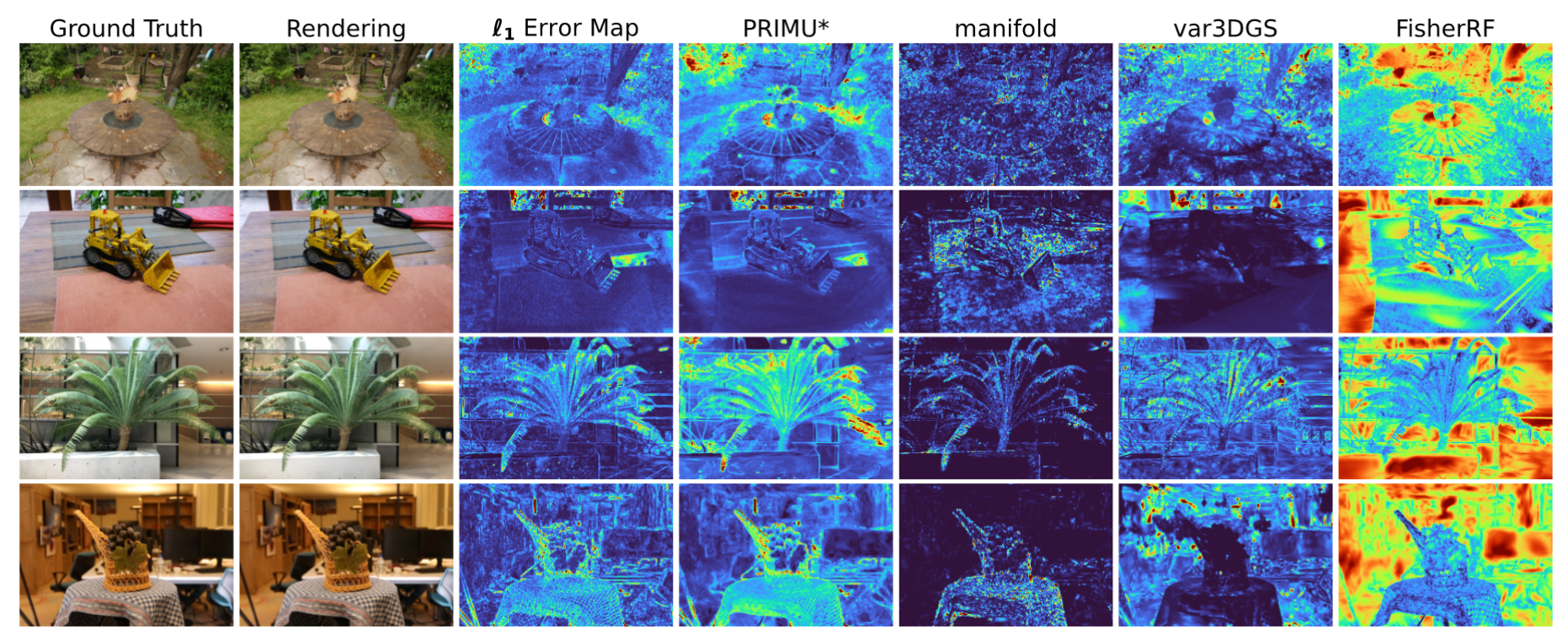
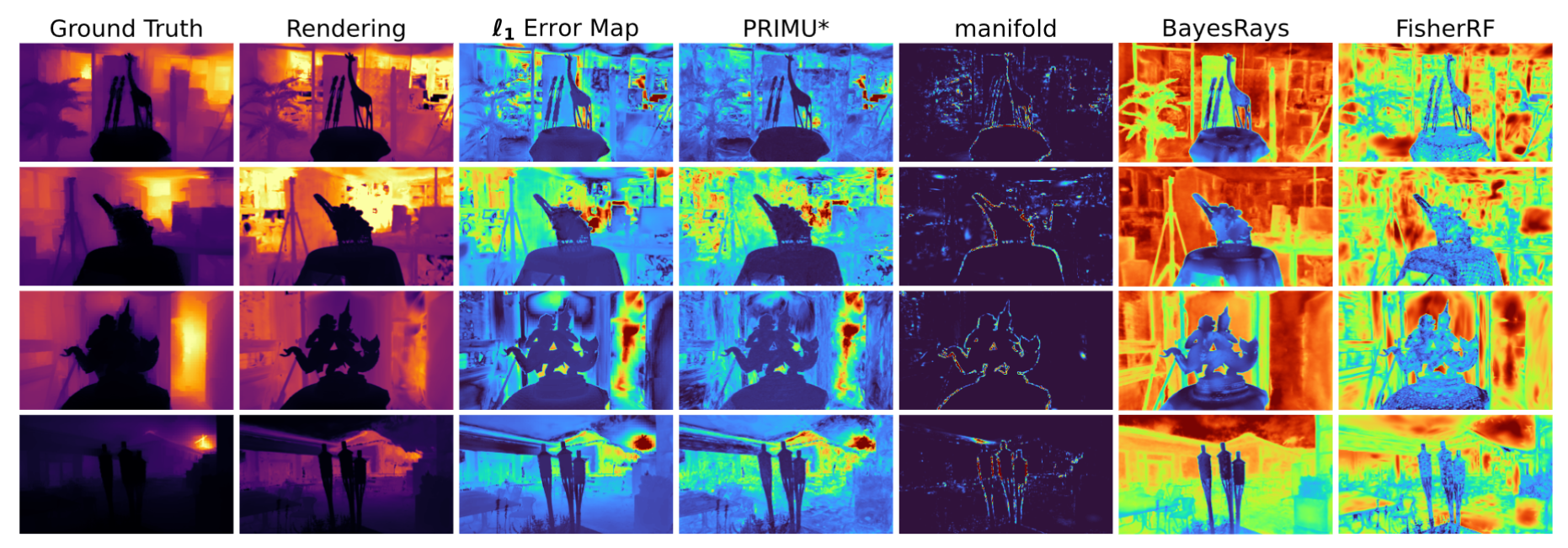
Qualitative Results
Rendering Error Uncertainty Maps
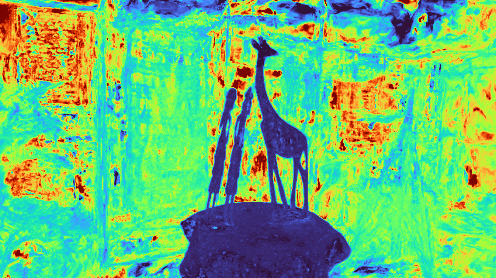
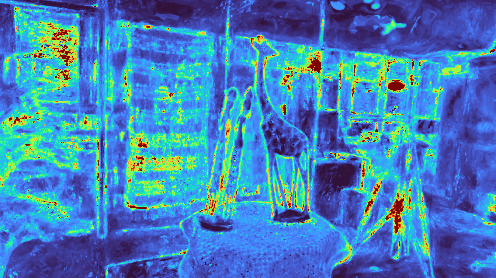
Depth Uncertainty Maps
Resources & Links
Acknowledgments

T.G. P.S., and M.R. acknowledge support by the state of North Rhine-Westphalia and the European Union within the EFRE/JTF project "Just scan it 3D", grant no. EFRE-20800529.
E.H. and M.R. acknowledge support through the junior research group project "UnrEAL" by the German Federal Ministry of Education and Research (BMBF), grant no. 01IS22069.
C.J. acknowledge the support from the Australian Research Council Research Hub in Intelligent Robotic Systems for Real-Time Asset Management (ARIAM) (IH210100030), QUT Centre for Robotics, and Abyss Solutions.
M.R. acknowledges mobility support by the German Academic Exchange Service (DAAD PPP), grant no. 57700453.
Citation
@article{gottwald2025primu,
title={PRIMU: Uncertainty Estimation for Novel Views in Gaussian Splatting from Primitive-Based Representations of Error and Coverage},
author={Gottwald, Thomas and Heinert, Edgar and Stehr, Peter and Galappaththige, Chamuditha Jayanga and Rottmann, Matthias},
journal={arXiv:2508.02443},
year={2025}
}
Contact
Have questions or want to collaborate? Reach out:
- Email: gottwald[at]uni-wuppertal.de